
Robotprojekt
- Post by: tildelarsson
- 23rd May 2022
- No Comment
Robotprojekt


Programme: Maskinteknik
Course: MT1538
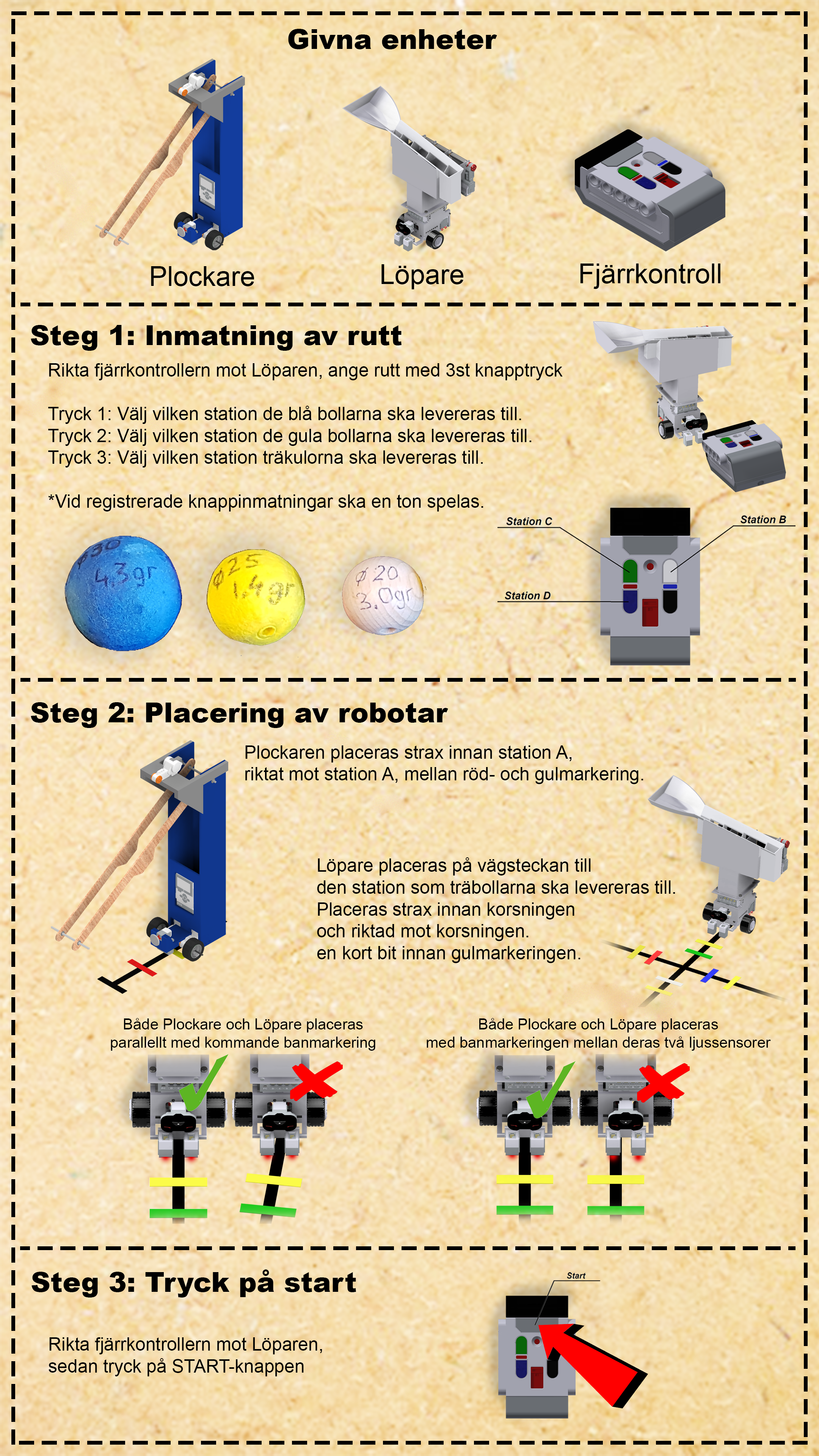
Challenge: In two teams, construct two cooperating robots. The robots are bound by a track with 4 stations, one with unsorted balls and the other three are delivery points for sorted balls. The robots has to sort and deliver the balls to the corresponding station.
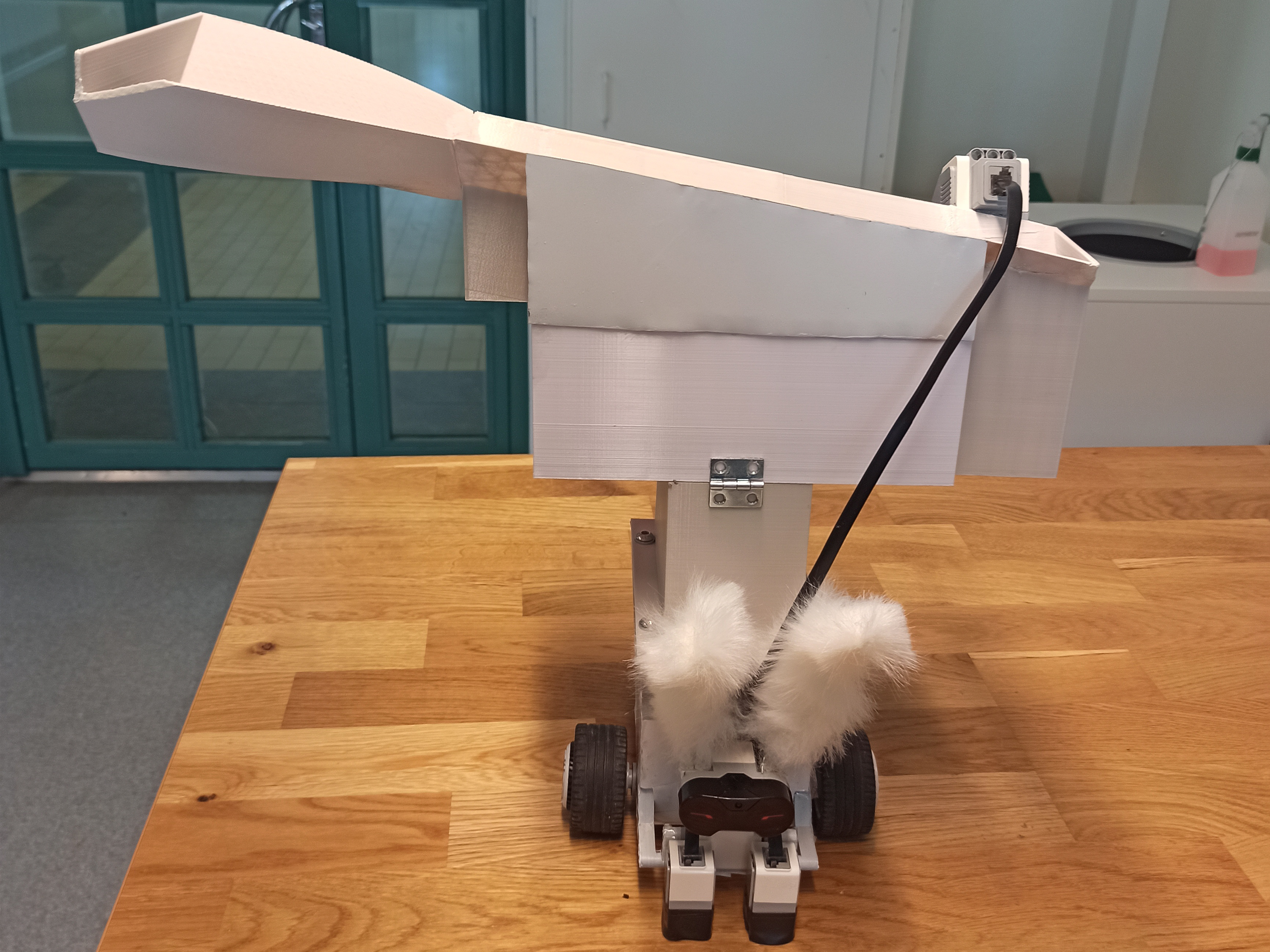
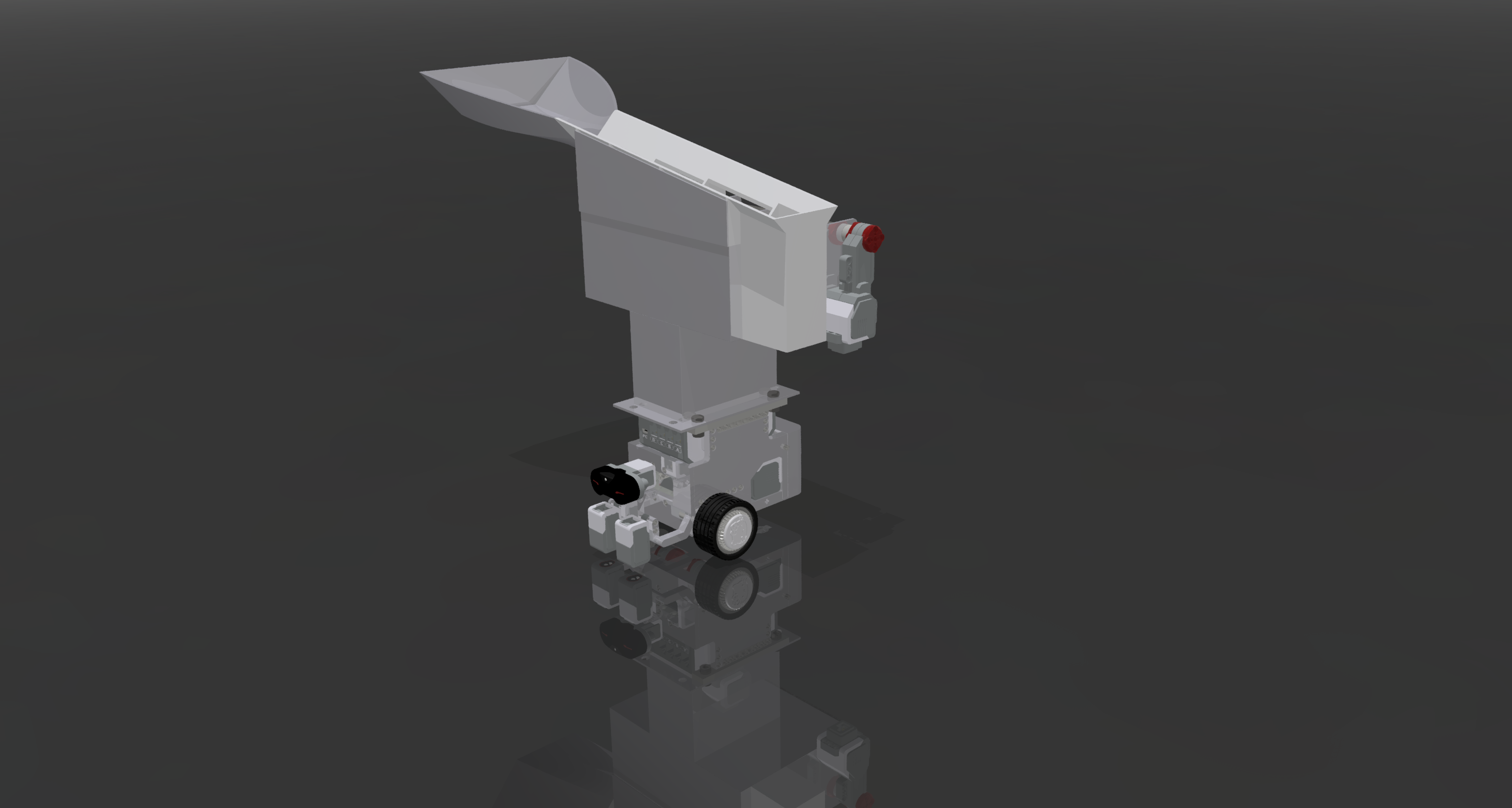
Solution: One robot will use a conveyor belt with buckets, akin to a bucket escavator, will collect the unsorted balls and elevate them up, then drop them to the next robot. The other robot will catch the falling balls, then run them down a sorting system with different sized holes corresponding to each ball. The balls go into their own container, each container has a door. The robot will then use a linefollowing code to pathfind around the track to the right stations, drop its payload, then return to the first robot.
Impact: By working together and working towards a common goal, winning, we learn how to work in a group but also get motivated to improve ourself. In everything such as brainstorming, prototyping, planning, construction and teamworking.
Prototypes: We began with drawing mockups on a whiteboard, then we create the prototyp in cardboard, or LEGO, or create it in a CAD program. When we are satisfied, it is only then we proceed with 3D printing. But sometimes we need to go back to the drawingboards and rethink our solutions.
Project team:
Kevin Larsson, Isak Bjelke, Hashem Kaleifa & Abdirashid Bashir