
Robotrace med lego mindstorm
- Post by: tildelarsson
- 3rd June 2021
- No Comment
Sortering av bollar med två autonoma robotar





Programme: Civilingenjör Maskinteknik
Course: MT1538
Challenge:Att bygga två autonoma robotar med mobil förmåga som samarbetar mot ett gemensamt mål. I detta fall, plocka och sortera bollar.
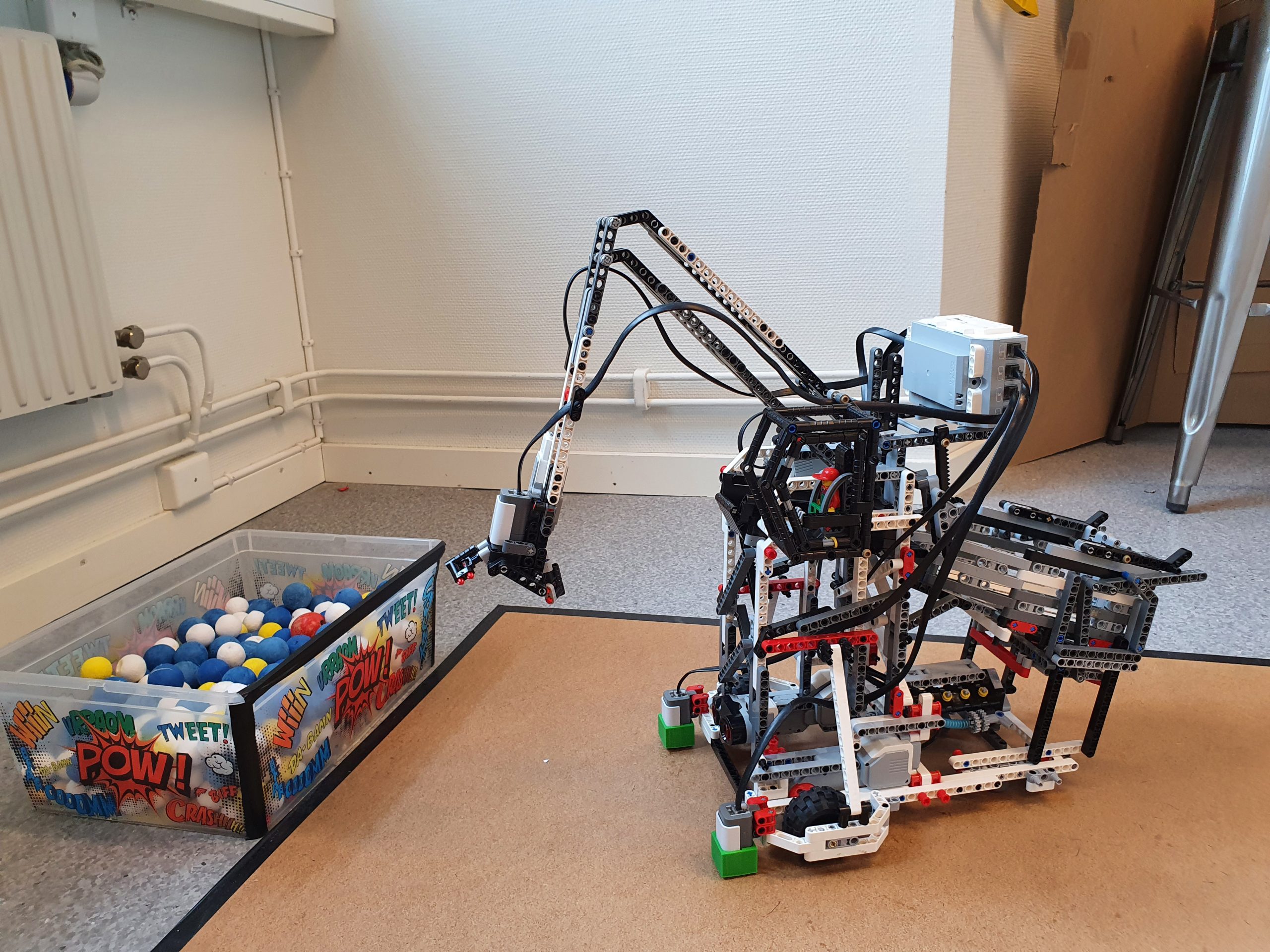
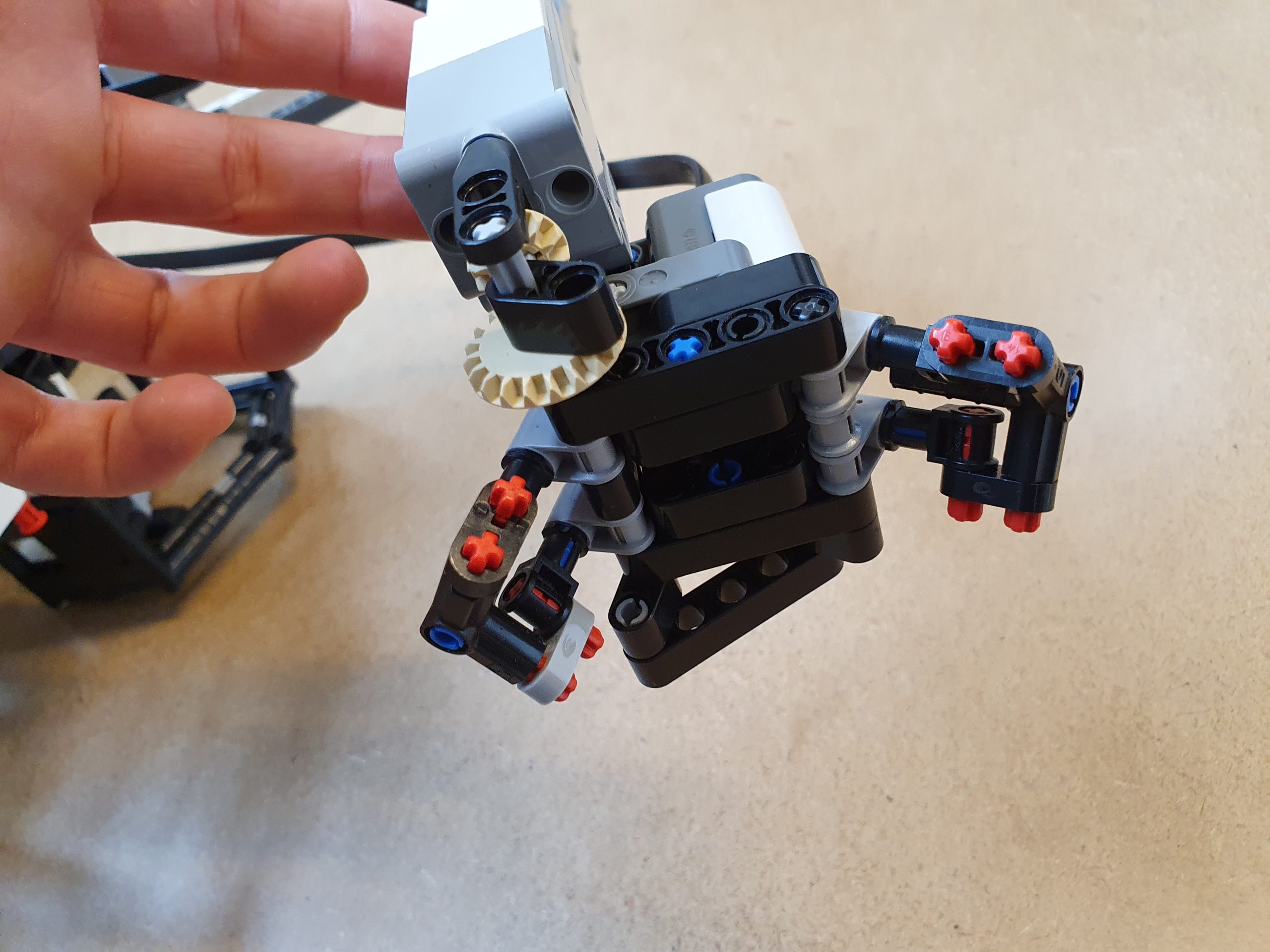
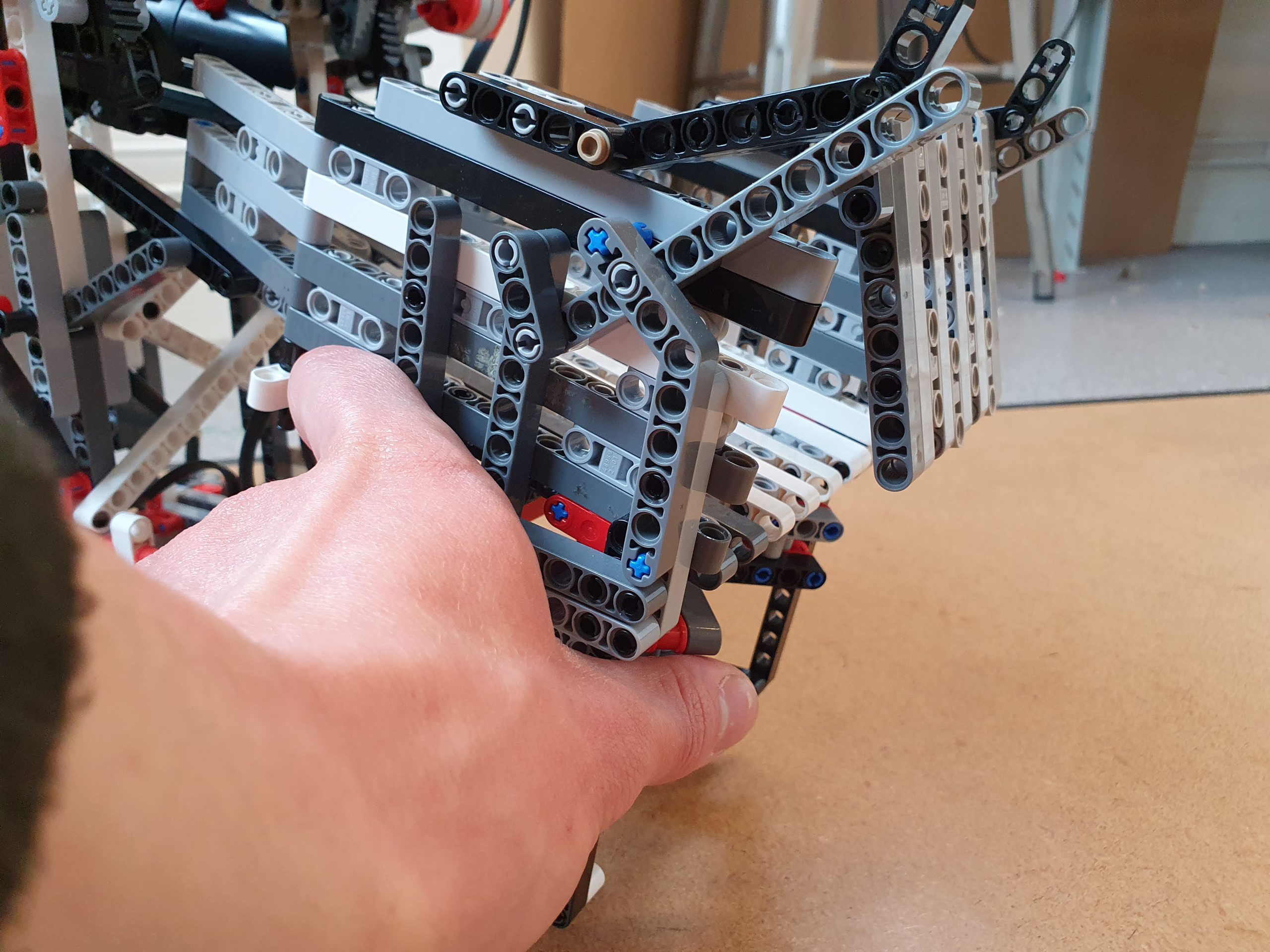
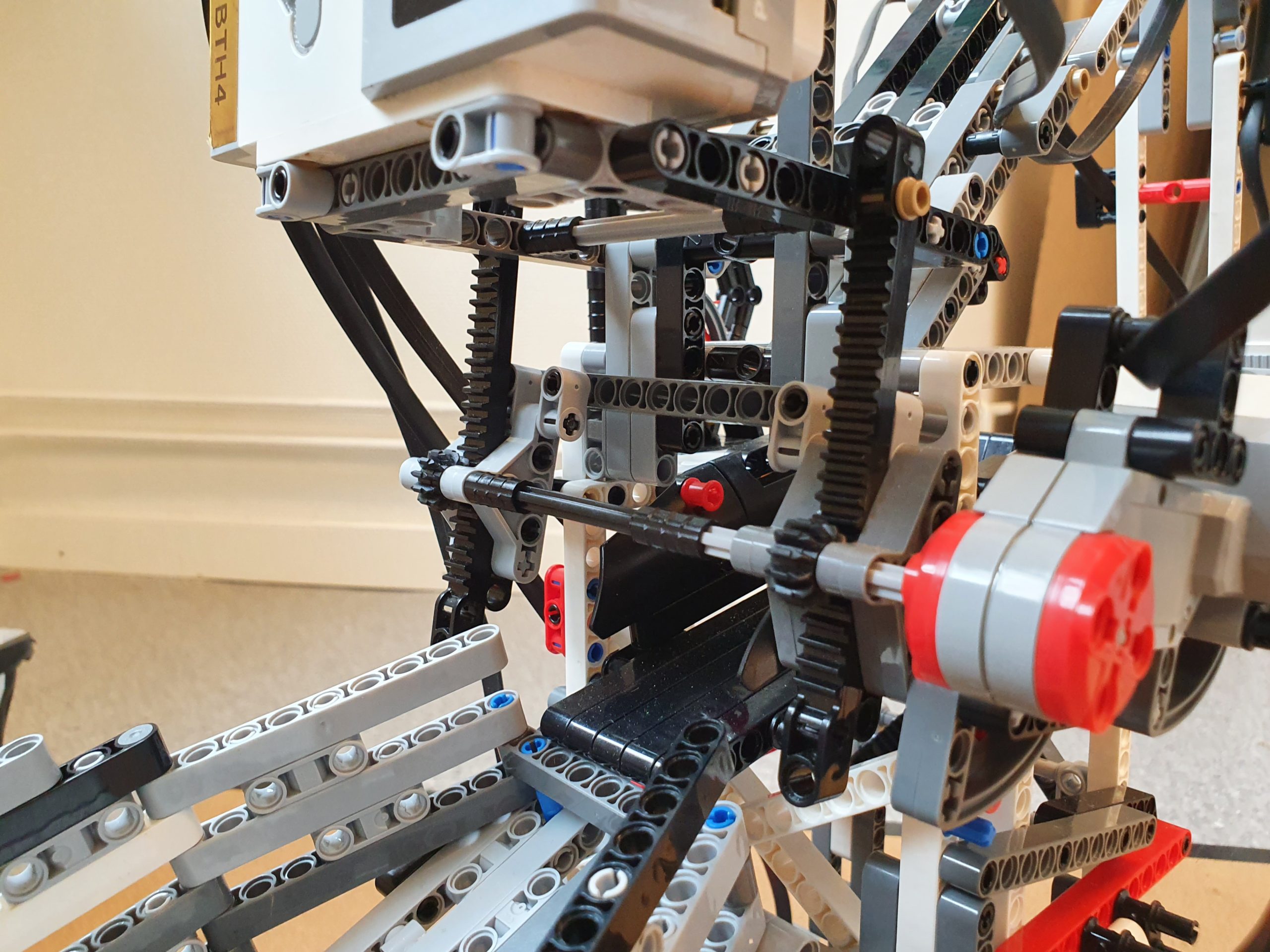
Solution: Slutprodukten av bygget blev en robot med en rigid chassikonstruktion som var driven av två stora motorer på främre hjulen samt två stödkulor bak som kunde rotera fritt. Framför hjulen på varje sida satt färgsensorer som detekterade linjerna längst banans ytterkant. Mellan hjulen där fram satt en ultraljudssensor som mätte avståndet framför. Plockningen av bollarna gjordes med bollgripen. I bollgripen satt en färgsensor som kollade färgen på bollarna. En medium motor fanns på sidan av gripen som öppnade och stängde klon. Klon hissades upp och ner med hjälp av en parallellkran som var driven av en stor motor och i toppläget släppte klon bollarna i en ränna. Denna ränna gick under griparmen till en behållare som bevarade bollarna till överlämningen.
Impact: Roboten är byggd av lego som kan demonteras och återanvändas.
Prototypes: Första prototypen hade banddrift som inte hade en entydig körning och det ändrades till hjul som inte längre slirade vid sväng. I många prototyper av gripen hamlade bollen snett och för nära ljussensorn vilket gjorde att sensorn läste av fel färg vilket gav ett icke gynnsamt resultat. I slutliga versionen av bollgripen löstes dessa problem med att centrera bollen under ljussensorn på ett sådant avstånd att avläsningen inte skulle bli felaktig.
Project team: Alex Fredin, Nicke Fridström, Mattias Pogén, Julius Englund