
Evomatic P2B
- Post by: Tobias Larsson
- 19th January 2020
- No Comment
Modularisering och standardisering av ett gripdon

Programme: Civilingenjör i Maskinteknik, 2017
Course: MT1454
Corporate partner: Evomatic
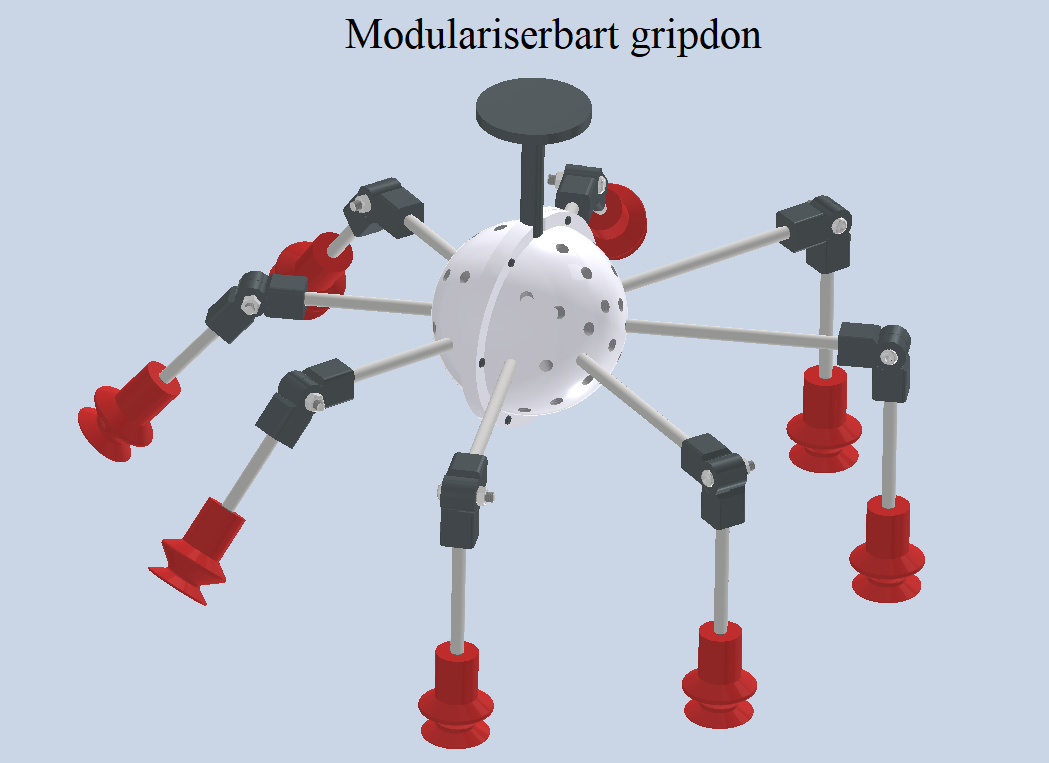
Challenge: Att modularisera ett gripdon så att den kan anpassas och justeras till att kunna lyfta upp olika geometrier där svets undviks.
Solution: Ett gripdon med olika komponenter som sätts samman med hjälp av gängor och skruvar. Gripdonet bestod av två halvklot som bas som sitter på en robotarm i form av ett koordinatsystem. På klotet sitter stänger gängade i hålen som finns på klotet. Det finns även länkar som binder samman armens två delar för att få en böjande funktion. I slutet av varje arm sitter en sugkopp med hjälp av en gänga.
Impact: –
Prototypes: Vi gjorde en prototyp utav idéerna från konceptgenereringen.
Quotes from sponsor/partner: Bra och innovativ ide, finns vissa brister som bör förbättras.
Project team:Mohammed Al-Fadhli, Elin Olofsson, Muaz Abdul-Muti.