
PDRL (Product Development Research Lab) was well represented at the conference with six research papers and hosted a workshop on “Design of Product-Service Systems (Extended Reality technologies for PSS design)”.
Read More
PDRL (Product Development Research Lab) was well represented at the conference with six research papers and hosted a workshop on “Design of Product-Service Systems (Extended Reality technologies for PSS design)”.
Read More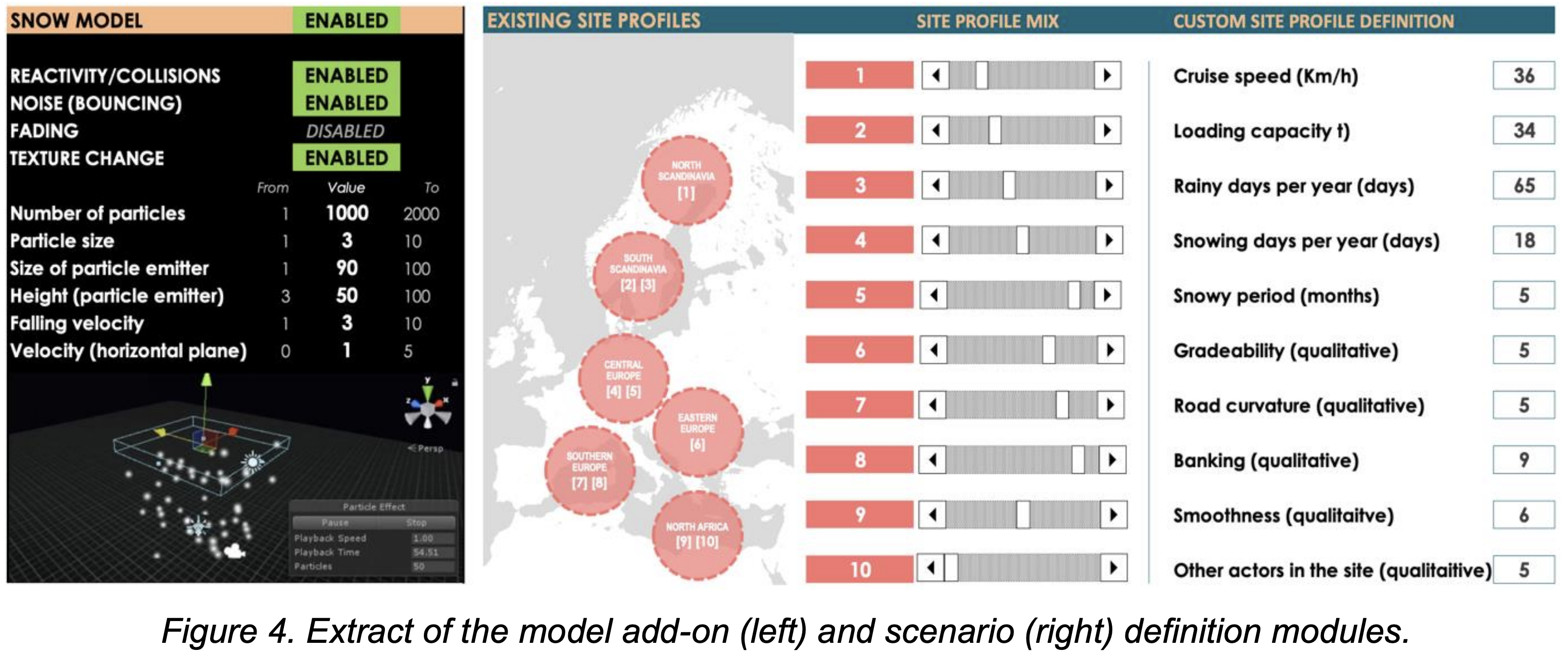
Abstract Autonomous vehicle solutions (AVS) are regarded as a major enabling technology to support the realization of ‘total site solutions’ in the construction equipment industry. Their full-scale deployment is hindered today by the need to test autonomous driving capabilities against the varying conditions an AVS is expected to be exposed to during its lifetime. Therefore, […]
Read More
In order to achieve scalability and robustness, verification and validation (V&V) of self-driving vehicle systems need to be largely performed virtually. This requires validated models on sensors, vehicles and environments where the systems are to operate. The aim of this pre-study is to identify state-of-the-art (SoA) and high-priority research questions within methods for validating models […]
Read More