
Image-Based Localization System
- Post by: Tobias Larsson
- 23rd April 2020
- No Comment
Abstract
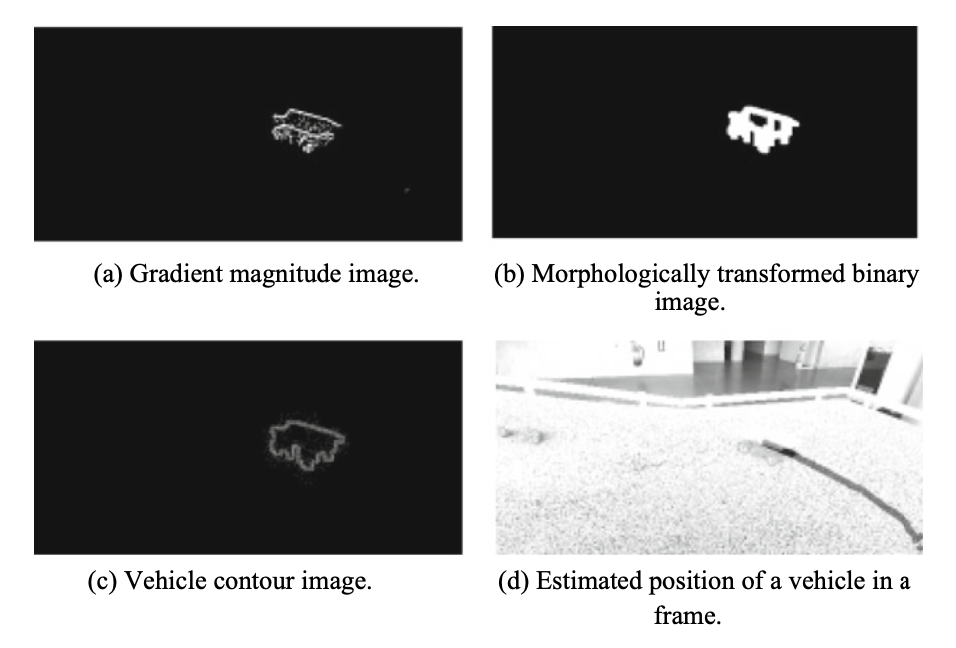
The position of a vehicle is essential for navigation of the vehicle along the desired path without a human interference. A good positioning system should have both good positioning accuracy and reliability. Global Positioning System (GPS) employed for navigation in a vehicle may lose significant power due to signal attenuation caused by construction buildings or other obstacles. In this paper, a novel real-time indoor positioning system using a static camera is presented. The proposed positioning system exploits gradient information evaluated on the camera video stream to recognize the contours of the vehicle. Subsequently, the mass center of the vehicle contour is used for simultaneous localization of the vehicle. This solution minimizes the design and computational complexity of the positioning system. The experimental evaluation of the proposed approach has demonstrated the positioned accuracy of 92.26%.
Keywords
Automatic indoor positioning system, Center of mass, Gradient positioning system, SLAM
Citation
Aeddula O.K., Gertsovich I. (2020) Image-Based Localization System. In: Saini H., Singh R., Tariq Beg M., Sahambi J. (eds) Innovations in Electronics and Communication Engineering. Lecture Notes in Networks and Systems, vol 107. Springer, Singapore. https://doi.org/10.1007/978-981-15-3172-9_52
Download
http://urn.kb.se/resolve?urn=urn:nbn:se:bth-20315
https://doi.org/10.1007/978-981-15-3172-9_52