
Design av autonomt system
- Post by: tildelarsson
- 6th June 2021
- No Comment
Leverans av bollar
Programme: Maskinteknik
Course: MT1538
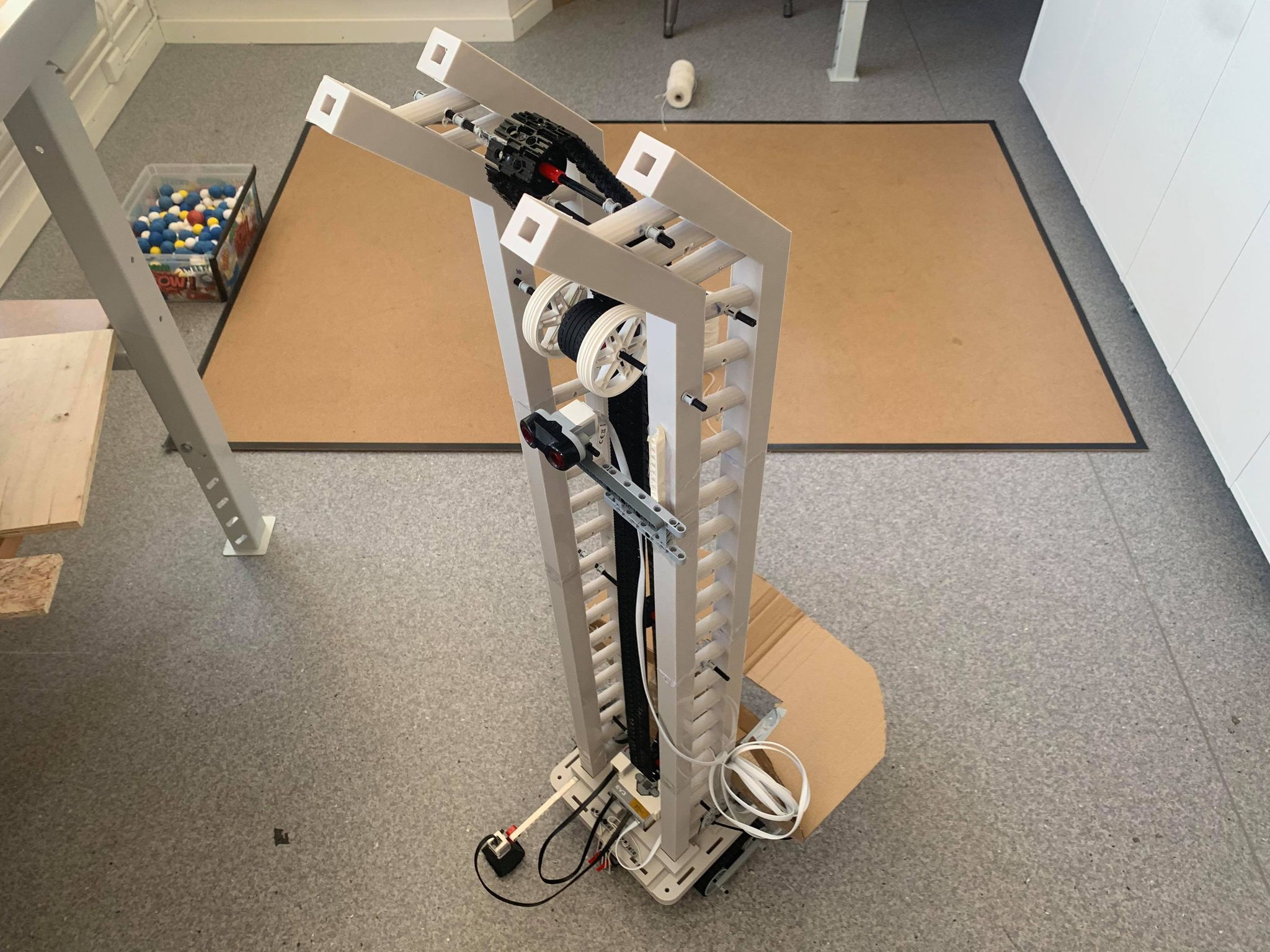
Challenge: Att konstruera två autonoma robotar som skulle samarbeta och plocka bollar från ett boll hav som sedan skulle sorteras och lämnas i en annan korg upp på ett bord, på en bestämd bana.
Solution: Den ena roboten plockade och sorterade bollar från boll havet med hjälp av en klo och färg sensor. Kommunikation mellan robotarna genomfördes med hjälp av Bluetooth och en IR-beacon som gjorde dockning och överlämning av bollar möjligt. Den andra roboten körde till avsedd låda och hissade upp bollen med hjälp av en korg och conveyor belt. Navigering gjordes medhjälp av gyro och ljussensor samt ultrasonic sensor.
Impact: Den ena roboten plockade och sorterade bollar från boll havet med hjälp av en klo och färg sensor. Kommunikation mellan robotarna genomfördes med hjälp av Bluetooth och en IR-beacon som gjorde dockning och överlämning av bollar möjligt. Den andra roboten körde till avsedd låda och hissade upp bollen med hjälp av en korg och conveyor belt. Navigering gjordes medhjälp av gyro och ljussensor samt ultrasonic sensor.
Prototypes: Designat virtuell lego robotar i LDD och 3D printat delar till verklig lego robot.
Project team: Isac Andersson , Linnea Sandberg, Moshtagh Baghari, & Ibrahim Hudji