
The Organizer
- Post by: Tobias Larsson
- 20th October 2020
- No Comment
Projektkurs 1


Programme: Civilingenjör Maskinteknik , Class of 2018
Course: MT1538
Corporate partner:
Challenge: Ett team bestående av två lag ska bygga varsin robot som tillsammans ska kunna samarbeta helt autonomt. Dessa två robotar ska plocka upp osorterade kulor från en behållare, därefter ska kulorna sorteras och fraktas. När kulorna fraktats till angiven plats ska de lämnas i korrekt behållare. Detta ska upprepas under en tio minuters period. Placering av kulor i korrekt behållare ger poäng, tappade eller felplacerade kulor ger poängavdrag. Målet är att placera så många kulor det går i rätt behållare under tio minuter för att få maximalt med poäng. I denna rapport är fokus på roboten som ska sortera och lämna kulor.
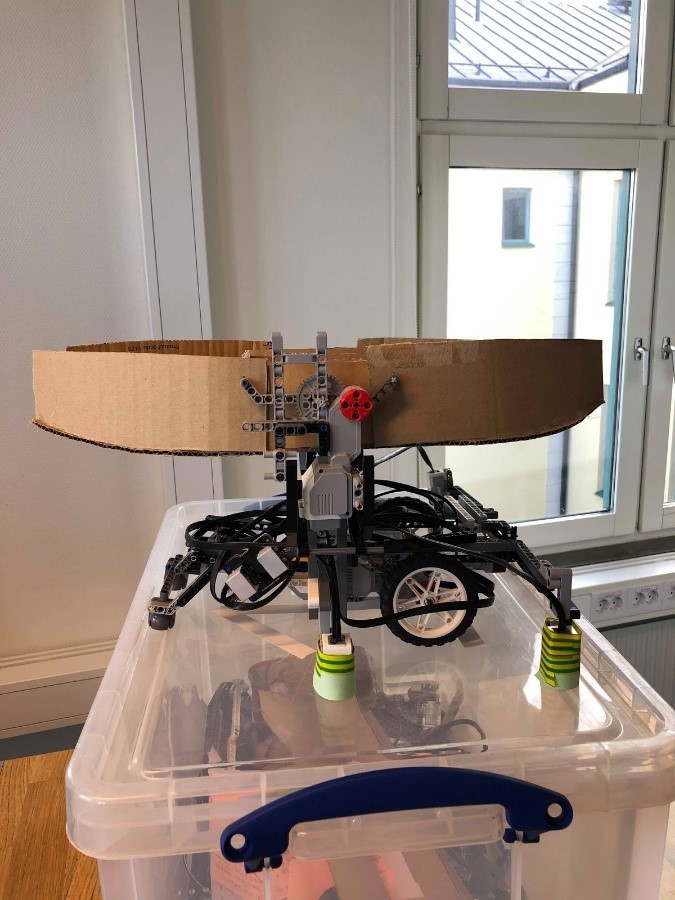
Solution:Vårat team byggde roboten som skulle sortera och lämna av kulor. Roboten ska byggas med en stabil grund, denna grund var av trä och man kunde därför lätt montera på de saker som behövdes. Roboten byggdes låg så att kulorna lättare kunde levereras på en lägre höjd och därmed bidrog det till att andra gruppen kunde sänka sin tyngdpunkt. Roboten är byggd fyrkantig och med färgsensorer som följer linjen. Färgsensorerna är avskärmad från annat ljus med hjälp av behållare som 3D skrivits. Väggarna är byggda så att de kan hålla uppe behållaren och sorteraren. Väggarna är även avtagbara för att enkelt kunna komma åt motorer och sensorer. Alla sensorer och motorer sitter fast med 3D skrivna fästen. Roboten sorterar kulorna genom att filtrera ut kulorna i storleksordning, det finns fyra olika storlekar på kulorna. Kulorna kommer levereras med en klo som släpper kulorna i en ränna med hål i efter storlekarna på kulorna. När dessa kulor rullar ned för denna ränna faller rätt boll ned i en behållare som förvaras där till roboten anländer till rätt avlastningsstation. Behållaren har avtagbara väggar i varsin ände som tas bort efter hur kulorna ska sorteras vilket gör det möjligt att sortera kulorna efter alla möjliga kombinationer.
Impact:Våran lösnings påverkan gjorde så att roboten klarade sin uppgift med en bra säkerhet. Vi i teamet fick även lära oss mycket om tillverkning och grupparbete.
Prototypes: Vi gjorde en mängd olika prototyper som hela tiden kunde spegla hur våran slutgiltiga lösning skulle kunna vara.
Quotes from sponsor/partner: –
Project team:
- Jakob Nilsson, Maskinteknik, klass 2018, Civilingenjör.
- Viktor Svensson, Maskinteknik, klass 2018, Civilingenjör.
- (Naret Jasim, Maskinteknik, klass 2018, Civilingenjör).
- (Oscar Claesson, Maskinteknik, klass 2018, Civilingenjör).